Cruzr技术框架
引言
作为一名研发人员,当您第一次开机试图在Cruzr上编写第一个程序时可能会有很多的疑问,Cruzr系统结构是怎么样的,我要如何创建一个简单的工程? Cruzr机器人和其他的android设备如手机、平板、电视盒子有什么不同,机器人各模块之间又是如何工作的? 等等。
下面会简单介绍一下Cruzr技术框架,不仅能够解答以上的问题,同时还可以让大家了解Cruzr的内部实现原理,能够让大家快速的接入自己的程序。
Cruzr框架图
Cruzr内部实现原理
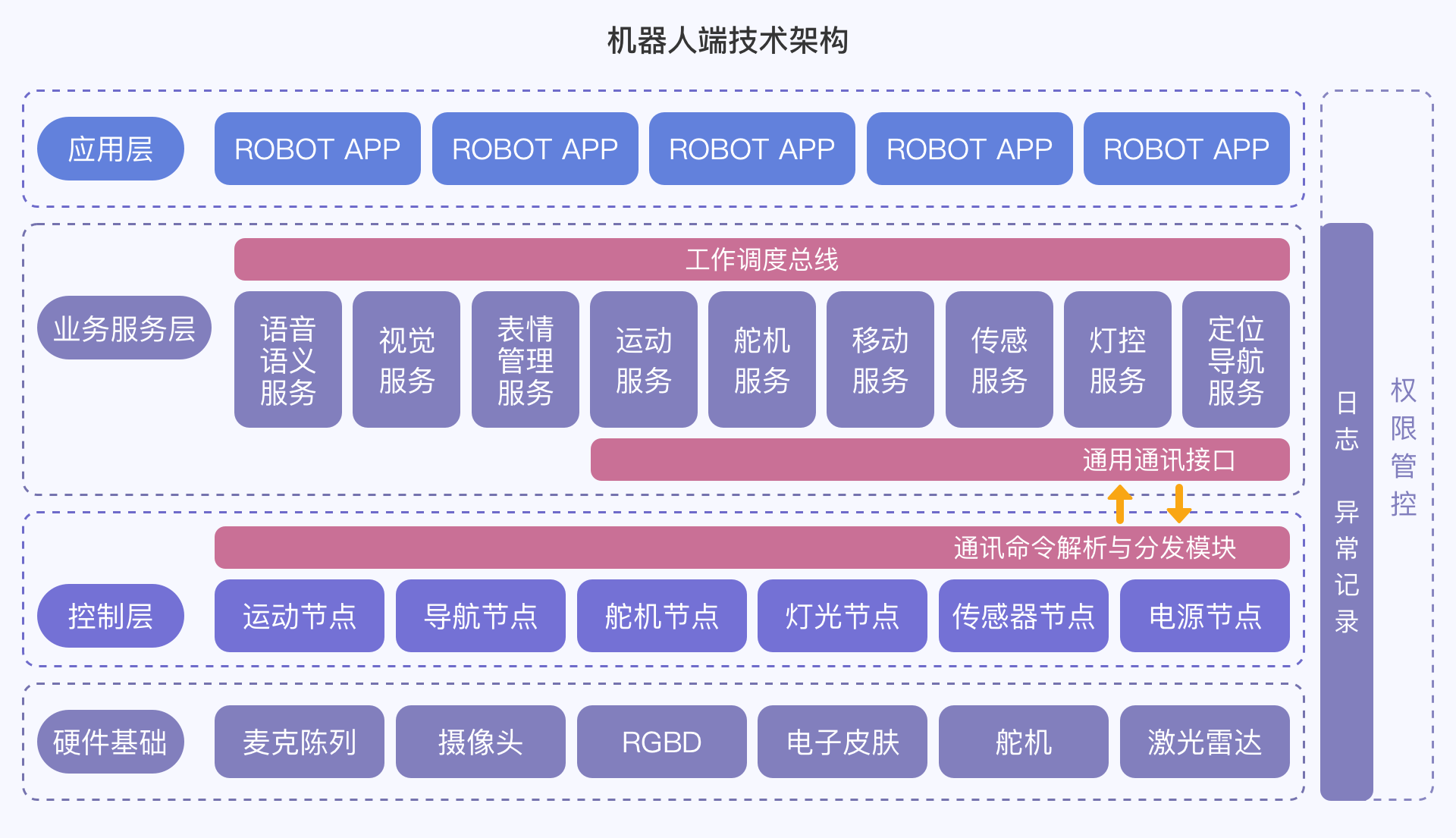
通过解析Cruzr框架图可知,Cruzr的软件结构由上到下分别是应用层、服务层、控制层,应用层接收用户录入事件,然后通过api接口调用服务层提供的功能,服务层通过socket下发对应的指令到控制层,控制层根据指令控制对应的硬件模块,同时传感器产生的数据通过控制层上传到服务层,然后再通过api的接口返回给应用层,应用层再通过界面显示或者语音反馈给用户。
有何不同
Cruzr和其他的android设备不同在于有更强大的硬件基础,需要更多的服务层进行管理,但对于开发者只需要关注我们的业务服务层和提供的api接口,所以基于Cruzr进行定制开发和其他android平台一样。